


















OFF
GO LOCAL
| Company | Stock | Price |
|---|---|---|


MIKROE-5980
21 g
Status:
Silent Step 4 Click is a compact add-on board representing a completely integrated step motor driver solution. This board features the TMC2240, a smart integrated stepper driver from Analog Devices. The driver is based on a 256 micro-steps built-in indexer, two fully integrated H-Bridges, and non-dissipative integrated current sensing (ICS). The two H-Bridges can drive motors of up to 36V and 3A at max. This Click board™ makes the perfect solution for the development of textile industry machines, lab and factory automation, 3D printers, and more.
Silent Step 4 Click is fully compatible with the mikroBUS™ socket and can be used on any host system supporting the mikroBUS™ standard. It comes with the mikroSDK open-source libraries, offering unparalleled flexibility for evaluation and customization. What sets this Click board™ apart is the groundbreaking ClickID feature, enabling your host system to seamlessly and automatically detect and identify this add-on board.
This product is no longer in stock
Availability date:
OFF
| Company | Stock | Price |
|---|---|---|
Silent Step 4 Click is based on the TMC2240, a smart integrated stepper driver from Analog Devices. It is highly integrated and highly efficient with a best-in-class performance stepper driver. The maximum output current per H-Bridge is 3A, which an onboard resistor sets. You can, however, set it to a lower level over the software. The step driver also features abundant diagnostics and protections such as short protection/OCP, thermal shutdown, and under-voltage lockout. It can measure the driver temperature, estimate the motor temperature, and more.
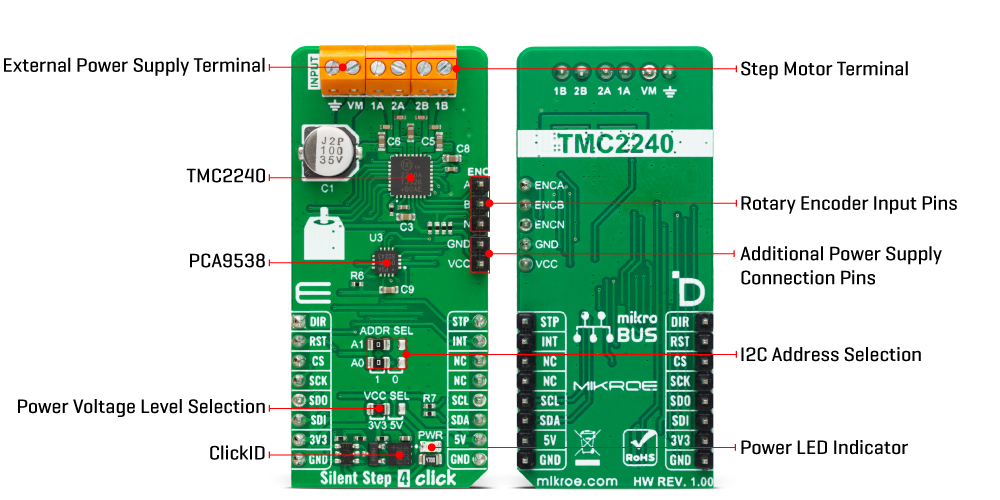
One cool feature is the rotary encoder interface integration directly into the step driver. The external incremental encoder can be connected over the ENC connector. The encoder can be used for consistency checks on the fly between the encoder position and the external ramp generator position. A 32-bit encoder counter is provided. StallGuard2 is a great functionality for detecting a motor stall and is part of the diagnostic system of the stepper driver.
Silent Step 4 Click uses a 4-wire SPI serial interface to communicate with the host MCU, supporting a max frequency of up to 10MHz. The motor is controlled using step and direction inputs over the STP and DIR pins. Each step can be a full-step or a micro-step. The additional functionalities are provided over the PCA9538, an 8-bit I/O port from NXP. The PCA9538 uses an I2C interface to communicate with the host MCU. The I2C address can be set over the ADDR SEL jumpers. It provides monitoring of both DIAG outputs and over-voltage indicators. It also controls the enable and sleep inputs of the stepper driver. The host MCU can reset the PCA9538 over the RST pin and receive interrupts over the INT pin.
This Click board™ can operate with either 3.3V or 5V logic voltage levels selected via the VCC SEL jumper. This way, both 3.3V and 5V capable MCUs can use the communication lines properly. Also, this Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used as a reference for further development.
Type
Stepper
Applications
Can be used for the development of textile industry machines, lab and factory automation, 3D printers, and more
On-board modules
TMC2240 - smart integrated stepper driver from Analog Devices
Key Features
Two H-Bridges, fully integrated lossless current sensing, wide external voltage range, incremental encoder interface, high micro-step resolution, thermal shutdown, short protection, diagnostics, StallGuard2, StallGuard4, overvoltage protection, and more
Interface
I2C,SPI
Feature
ClickID
Compatibility
mikroBUS™
Click board size
L (57.15 x 25.4 mm)
Input Voltage
3.3V or 5V,External
This table shows how the pinout on Silent Step 4 Click corresponds to the pinout on the mikroBUS™ socket (the latter shown in the two middle columns).
| Notes | Pin | Pin | Notes | ||||
|---|---|---|---|---|---|---|---|
| Direction Control | DIR | 1 | AN | PWM | 16 | STP | Step Control |
| Reset / ID SEL | RST | 2 | RST | INT | 15 | INT | Interrupt |
| SPI Chip Select / ID COMM | CS | 3 | CS | RX | 14 | NC | |
| SPI Clock | SCK | 4 | SCK | TX | 13 | NC | |
| SPI Data OUT | SDO | 5 | MISO | SCL | 12 | SCL | I2C Clock |
| SPI Data IN | SDI | 6 | MOSI | SDA | 11 | SDA | I2C Data |
| Power Supply | 3.3V | 7 | 3.3V | 5V | 10 | 5V | Power Supply |
| Ground | GND | 8 | GND | GND | 9 | GND | Ground |
| Label | Name | Default | Description |
|---|---|---|---|
| LD1 | PWR | - | Power LED Indicator |
| JP1 | VCC SEL | Left | Logic Level Voltage Selection 3V3/5V: Left position 3V3, Right position 5V |
| JP2-JP3 | ADDR SEL | Left | I2C Address Selection 0/1: Left position 0, Right position 1 |
| Description | Min | Typ | Max | Unit |
|---|---|---|---|---|
| Supply Voltage | 3.3 | - | 5 | V |
| External Power Supply | 4.5 | - | 36 | V |
| Output Current per H-Bridge | - | - | 3 | A |
We provide a library for the Silent Step 4 Click as well as a demo application (example), developed using MIKROE compilers. The demo can run on all the main MIKROE development boards.
Package can be downloaded/installed directly from NECTO Studio Package Manager (recommended), downloaded from our LibStock™ or found on Mikroe github account.
Library Description
This library contains API for Silent Step 4 Click driver.
Key functions
silentstep4_set_direction This function sets the motor direction by setting the DIR pin logic state.
silentstep4_set_step_res This function sets the microstep resolution bits in CHOPCONF register.
silentstep4_drive_motor This function drives the motor for the specific number of steps at the selected speed.
Example Description
This example demonstrates the use of the Silent Step 4 click board by driving the motor in both directions for a desired number of steps.
void application_task ( void )
{
log_printf ( &logger, " Move 200 full steps clockwise, speed: slowrnn" );
silentstep4_set_direction ( &silentstep4, SILENTSTEP4_DIR_CW );
silentstep4_set_step_res ( &silentstep4, SILENTSTEP4_MRES_FULLSTEP );
silentstep4_drive_motor ( &silentstep4, 200, SILENTSTEP4_SPEED_SLOW );
Delay_ms ( 2000 );
log_printf ( &logger, " Move 200 half steps counter-clockwise, speed: mediumrnn" );
silentstep4_set_direction ( &silentstep4, SILENTSTEP4_DIR_CCW );
silentstep4_set_step_res ( &silentstep4, SILENTSTEP4_MRES_2 );
silentstep4_drive_motor ( &silentstep4, 200, SILENTSTEP4_SPEED_MEDIUM );
Delay_ms ( 2000 );
log_printf ( &logger, " Move 400 quarter steps counter-clockwise, speed: fastrnn" );
silentstep4_set_direction ( &silentstep4, SILENTSTEP4_DIR_CCW );
silentstep4_set_step_res ( &silentstep4, SILENTSTEP4_MRES_4 );
silentstep4_drive_motor ( &silentstep4, 400, SILENTSTEP4_SPEED_FAST );
Delay_ms ( 2000 );
}
The full application code, and ready to use projects can be installed directly from NECTO Studio Package Manager (recommended), downloaded from our LibStock™ or found on Mikroe github account.
Other Mikroe Libraries used in the example:
Additional notes and informations
Depending on the development board you are using, you may need USB UART click, USB UART 2 Click or RS232 Click to connect to your PC, for development systems with no UART to USB interface available on the board. UART terminal is available in all MIKROE compilers.
This Click board™ is supported with mikroSDK - MIKROE Software Development Kit. To ensure proper operation of mikroSDK compliant Click board™ demo applications, mikroSDK should be downloaded from the LibStock and installed for the compiler you are using.
For more information about mikroSDK, visit the official page.
NOTE: Please be advised that any peripheral devices or accessories shown connected to the Click board™ are not included in the package. Check their availability in our shop or in the YMAN section below.

$889.00

$95.00

$549.00

$299.00

$29.00

$29.00

$6.59

$3.60

$119.00

$349.00

$349.00

$299.00

$449.00

$349.00

$269.00

$249.00

$209.00
