














OFF
GO LOCAL
| Company | Stock | Price |
|---|---|---|


MIKROE-2025
25 g
Status:
Haptic Click is a compact add-on board that controls ERM and LRA vibration motors. This board features the DRV2605, a haptic driver for ERM and LRA with a built-in library and Smart-Loop architecture from Texas Instruments. The acronyms stand for Eccentric Rotating Mass and Linear Resonant Actuator, respectively. The DRV2605 integrates an extensive library with over 100 haptic effects, including audio-to-vibe features (audio interface through a 3.5mm jack), which generate vibrations from the lower frequency range of the audio input (licensed version of ToushSense® 2200 effects from Immersion). This Click board™ makes the perfect solution for numerous everyday applications such as indicator systems, training equipment/simulators with haptics function, robotics and mechatronics, and more.
Haptic Click is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click board™ comes as a fully tested product, ready to be used on a system equipped with the mikroBUS™ socket.
This product is no longer in stock
Availability date:
OFF
| Company | Stock | Price |
|---|---|---|
Haptic Click is based on the DRV2605, a haptic driver for ERM and LRA with a built-in library and Smart-Loop architecture from Texas Instruments. It is designed to provide highly flexible haptic control of ERM and LRA actuators over a shared I2C bus, thus relieving the host MCU from generating PWM drive signals and saving both costly timer interrupts and hardware pins. Using the ToushSense® 2200 software eliminates the need to design waveforms, too. It includes an extensive effects library and audio vibe features, with a real-time playback mode that allows the host MCU to bypass the library playback engine and play waveforms directly from the host through I2C. The Smart Loop architecture allows effortless auto resonant drive for LRA and feedback-optimized ERM drive. The audio-to-haptics mode automatically converts an audio input signal to meaningful haptic effects.
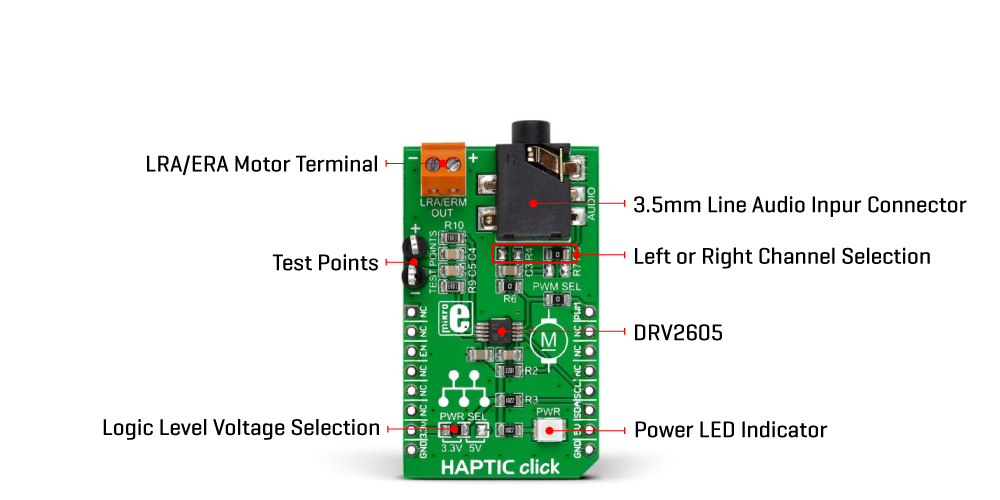
Haptic Click communicates with the host MCU using a standard I2C 2-Wire interface over the mikroBUS™ socket. The input audio signal to the DRV2605 comes through a 3.5mm audio jack. The channel side (left or right) can be selected over an R4 and R5 pair of jumpers, with R5 populated by default, thus choosing the right channel. The PWM SEL jumper disables the PWM trigger when unsoldered, thus avoiding potential interference with audio output. The LRA/ERM screw terminal is used to connect the haptic motor. In addition, this Click board™ features test points to hook up measuring equipment while developing. These test points are connected to the DRV2605 outputs toward LRA/ERM screw terminals.
This Click board™ can operate with either 3.3V or 5V logic voltage levels selected via the PWR SEL jumper. This way, both 3.3V and 5V capable MCUs can use the communication lines properly. However, the Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used, as a reference, for further development.
Type
Haptic
Applications
Can be used for numerous everyday applications such as indicator systems, training equipment/simulators with haptics function, robotics and mechatronics, and more
On-board modules
DRV2605 - haptic driver for ERM and LRA with built-in library and Smart-Loop architecture from Texas Instruments
Key Features
Flexible haptic/vibra driver, I2C interface, smart-loop architecture, audio jack for audio-to-vibe effects, integrated library with over a 100 haptic effects, optional PWM control, and more
Interface
I2C,PWM
Feature
No ClickID
Compatibility
mikroBUS™
Click board size
M (42.9 x 25.4 mm)
Input Voltage
3.3V or 5V
This table shows how the pinout on HAPTIC Click corresponds to the pinout on the mikroBUS™ socket (the latter shown in the two middle columns).
| Notes | Pin | Pin | Notes | ||||
|---|---|---|---|---|---|---|---|
| NC | 1 | AN | PWM | 16 | PWM | PWM Signal | |
| NC | 2 | RST | INT | 15 | NC | ||
| Enable | EN | 3 | CS | RX | 14 | NC | |
| NC | 4 | SCK | TX | 13 | NC | ||
| NC | 5 | MISO | SCL | 12 | SCL | I2C Clock | |
| NC | 6 | MOSI | SDA | 11 | SDA | I2C Data | |
| Power Supply | 3.3V | 7 | 3.3V | 5V | 10 | 5V | Power Supply |
| Ground | GND | 8 | GND | GND | 9 | GND | Ground |
| Label | Name | Default | Description |
|---|---|---|---|
| LD1 | PWR | - | Power LED Indicator |
| J1 | PWR SEL | Left | Logic Level Voltage Selection 3V3/5V: Left position 3V3, Right position 5V |
| J2 | PWR SEL | Populated | PWM Enable/Disable Jumper |
| R4 | R4 | Unpopulated | Left Audio Channel Selection Jumper |
| R5 | R5 | Populated | Right Audio Channel Selection Jumper |
| Description | Min | Typ | Max | Unit |
|---|---|---|---|---|
| Supply Voltage | - | 3.3 | - | V |
| PWM Frequency | 10 | - | 250 | KHz |
| LRA Frequency Range | 125 | - | 300 | Hz |
| Load Impedance | 8 | - | - | Ω |
We provide a library for the HAPTIC Click as well as a demo application (example), developed using Mikroe compilers. The demo can run on all the main Mikroe development boards.
Package can be downloaded/installed directly from NECTO Studio Package Manager (recommended), downloaded from our LibStock™ or found on Mikroe github account.
Library Description
This library contains API for HAPTIC Click driver.
Key functions
Enable the device function.
Disable the device function.
Sets the Haptic click to desired mode function.
Example Description
This application generate vibrations from the lower frequency range of the audio input.
void application_task ( void )
{
// Nothing to do here...
}
The full application code, and ready to use projects can be installed directly from NECTO Studio Package Manager (recommended), downloaded from our LibStock™ or found on Mikroe github account.
Other Mikroe Libraries used in the example:
Additional notes and informations
Depending on the development board you are using, you may need USB UART click, USB UART 2 Click or RS232 Click to connect to your PC, for development systems with no UART to USB interface available on the board. UART terminal is available in all Mikroe compilers.
This Click board™ is supported with mikroSDK - Mikroe Software Development Kit. To ensure proper operation of mikroSDK compliant Click board™ demo applications, mikroSDK should be downloaded from the LibStock and installed for the compiler you are using.
For more information about mikroSDK, visit the official page.
NOTE: Please be advised that any peripheral devices or accessories shown connected to the Click board™ are not included in the package. Check their availability in our shop or in the YMAN section below.

$889.00

$95.00

$549.00

$299.00

$29.00

$29.00

$3.30

$3.60

$119.00

$449.00

$349.00

$349.00

$349.00

$299.00

$269.00

$249.00

$209.00
