















OFF
TOF Sensor Board
GO LOCAL
| Company | Stock | Price |
|---|---|---|


15 g
Status:
AFBR-S50 ToF Sensor Board represents an integrated solution based on the Broadcom AFBR-S50 medium-range 3D multipixel Time-of-Flight (ToF) sensor for distance and motion measurement. The AFBR-S50 has been optimized to measure various distances working equally well on white, black, colored, and metallic reflective surfaces. It provides an ideal solution for robotics and industrial applications requiring precise 3D information and an extended range like drones or AMR/AGV. The AFBR-S50 ToF Sensor Board includes a 32-bit MCU and a VCSEL-based ToF sensor (Laser Class 1 eye safety), mounted on a compact-sized PCB, measuring only 35mm×35mm in size, alongside a 4-pin standard CAN connections compatible with Pixhawk®, a popular general-purpose flight controller. The size of the entire PCB allows users to realize an easy-to-implement subsystem and be used as a complete ToF module in an out-of-the-box manner, cutting the time to market.
NOTE: The alternative design of this solution, for all AFBR-S50 sensors, can also be found in a more compact form, compatible with our mikroBUS™ standard in the form of a Click board™. For more information, please visit the LightRanger 7 Click product page.
NOTE: The BDC-AFBR-S50 - Socket version comes only with a socket specifically designed for the AFBR-S50 sensors but does not include the AFBR-S50 sensor itself.
This product is no longer in stock
Availability date:
OFF
| Company | Stock | Price |
|---|---|---|
AFBR-S50 ToF Sensor Board as its foundation uses the AFBR-S50, a multi-pixel optical distance and motion measurement sensor module based on the Time-of-Flight principle from Broadcom. The AFBR-S50 is developed with a particular focus on applications with the need for the highest speed and accuracy at medium distance ranges with low power consumption. Due to its best-in-class ambient light suppression, use in outside environments is possible in direct sunlight and also on white, black, colored, metallic, and retroreflective surfaces. This feature makes it suitable for optical distance measurements requiring precise 3D information and extended range like drones or AMR/AGV.
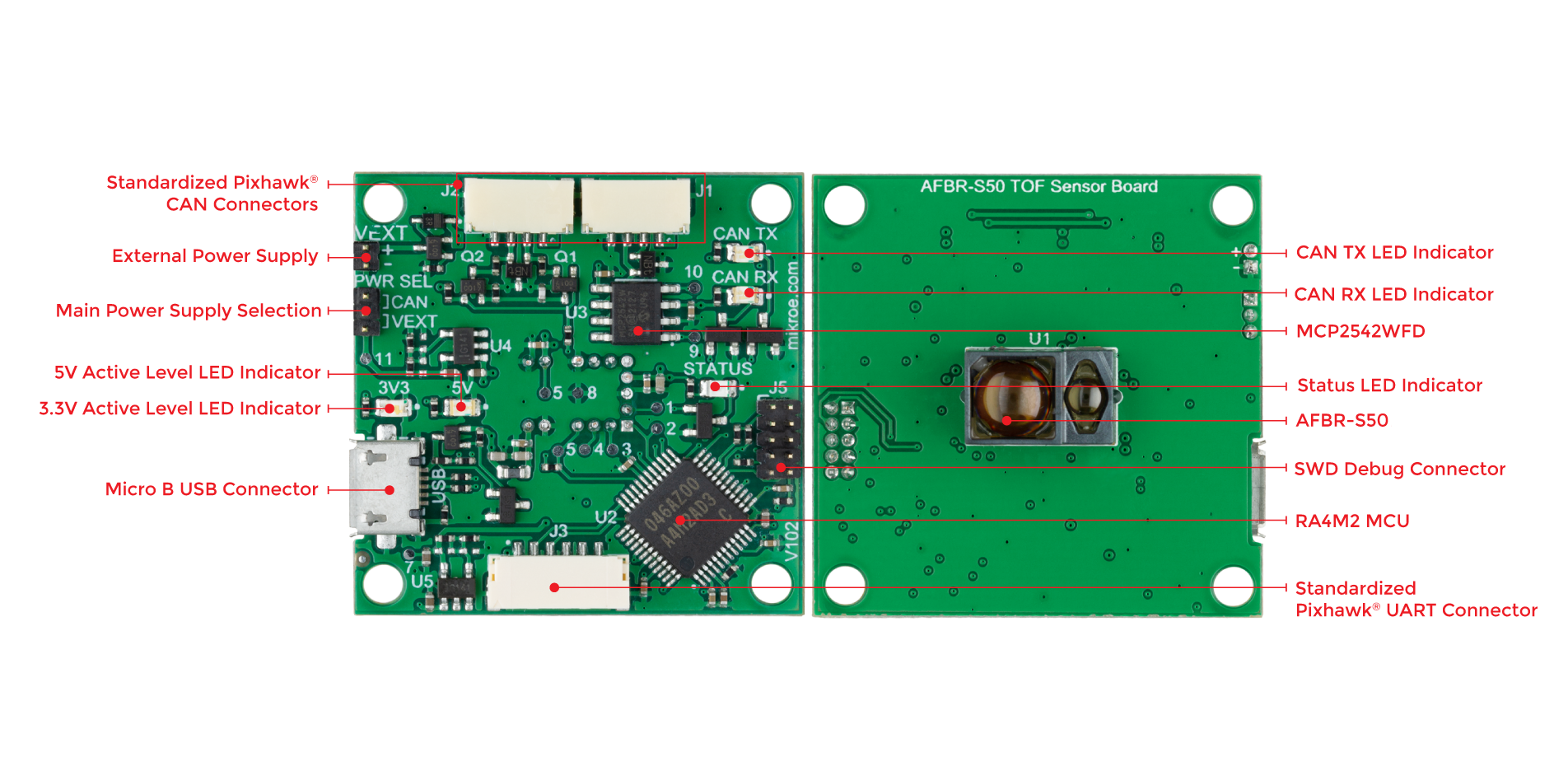
This board represents an integrated solution consisting of a 32-bit MCU, RA4M2 group of Renesas MCU with Arm® Cortex®-M33 core, and a ToF sensor with an integrated infrared laser light source (850nm) mounted on a compact-sized PCB that measures 35mm×35mm. In addition to an SPI-compatible interface for data transferring to the MCU, the AFBR-S50 also has an interrupt line through which the MCU can register the data-ready event. Also, such conditions and other interrupts can be visually represented using the yellow LED indicator marked with STATUS.
As mentioned before, this board has two 4-pin CAN connectors, J1 and J2, controllable through onboard CAN controller MCP2542WFD, which allows the connection of additional external sensors in the company with one standard 2.54mm 6-pin male connector labeled as J3, exposing the UART interface. Since the AFBR-S50 is known to be used in both robotics and drones, it is essential to note that this ToF sensor is compatible with Pixhawk®, a popular general-purpose flight controller. Also, there is a clear visual indication of the execution of the communication itself; more precisely, the user can catch the operation of CAN communication/signal transfer via orange LED indicators provided for indication of received and transmitted CAN signals.
It offers complete debugging and programming capabilities supported through an additional header marked with J5. With this header, the user can use a Serial Wire Debug interface for programming and debugging, available through the SWD interface pins. Besides, it also has a Micro B USB connector allowing the board to be powered and configured by a personal computer (PC). This way, it is possible to flash the AFBR-S50 ToF Sensor Board via bootloader very simply. You can complete the programming procedure following the easy steps described in the attached Flash Start Guide document.
The ToF sensor requires a single power supply of 5V. For this reason, the user can choose how to power the board itself and the ToF sensor. The first way is to connect an external power supply to the connector marked with VEXT in the range of 2.5 to 16V, while the second is a level of 5V obtained from active CAN connectors (channels). The desired power supply can be selected by populating the preferred option on the PWR SEL header.
Bearing in mind that for communication with the MCU, the AFBR-S50 requires a level of 3.3V, there are two LDO regulators on the board, the SPX3819. One of them is used for the realization of 5V, necessary for the AFBR-S50 main power supply from an external power supply, while the other regulator serves to create a voltage of 3.3V essential for the proper operation of the MCU. Also, for the active voltage levels, 5V and 3.3V, green and blue LED indicators visually show such existence.
Procedure:
For further information on the Explorer check out the Getting Started Guide.
Type
Optical
Applications
Can be used as an easy-to-implement subsystem and a complete ToF module in an out-of-the-box manner ideal for robotics and industrial applications requiring precise 3D information and an extended range like drones or AMR/AGV, human machine interface, automation and control, and more
On-board modules
AFBR-S50 - Time-of-Flight sensor module for distance and
motion measurement from Broadcom
Key Features
High speed and accuracy at medium distance ranges with low power consumption, best-in-class ambient light suppression, multipixel for 3D motion detection, Laser Class 1 eye safe ready, compatible with Pixhawk® general-purpose flight controller, various communication interfaces, full debugging and programming capabilities, and more
Interface
CAN,SWD,UART,USB
Programming
Bootloader, External
Supply Voltage
USB,External
| Label | Name | Default | Description |
|---|---|---|---|
| LD1 | 5V | - | 5V Active Level LED Indicator |
| LD2 | 3V3 | - | 3V3 Active Level LED Indicator |
| LD3 | STATUS | - | Status LED Indicator |
| LD4 | CAN TX | - | CAN Transmitted Signal LED Indicator |
| LD5 | CAN RX | - | CAN Received Signal LED Indicator |
| J1-J2 | J1-J2 | Populated | Standardized Pixhawk® CAN Connectors |
| J3 | J3 | Populated | Standardized Pixhawk® UART Connector |
| J4 | PWR SEL | Lower | External Power Supply Selection CAN/VEXT: Upper position CAN, Lower position VEXT |
| J5 | J5 | Populated | SWD Interface Debug Connector |
| J6 | VEXT | Populated | External Power Supply Connector |
| TP1-TP11 | 1-11 | - | Testpoints |
 |
|
|
|
|
|
|---|---|---|---|---|---|
| TOF Sensor: | S50MV85I | S50MV85G | S50LV85D | S50LX85D | S50MV68B |
| MIKROE PID | MIKROE-5631 | MIKROE-5630 | MIKROE-4910 | MIKROE-5628 | MIKROE-5629 |
| Typ. Range | 5 m | 10 m | 30 m | 50 m | 10 m |
| Range white @1klx | 12 m | 36 m | 61 m | 78 m | 36 m |
| Range white @100klx | 4 m | 12 m | 20 m | 30 m | 15 m (50klx) |
| Laser Light Source | 850 nm (IR) | 850 nm (IR) | 850 nm (IR) | 850 nm (IR) | 680 nm (red) |
| Illuminated Pixels |  |
 |
 |
|
.png) |
| Usable Sensor FoV |  |
 |
 |
|
 |
| Beam spot size 1m | 23cm x 10cm | 7 cm | 3.5 cm | 3.5 cm | 0.7 cm |
| Typ. Application | AMR/AGV, Factory Automation | Factory Automation, Fill Level | UAV, factory automation, Fill Level | UAV | Factory Automation |
| Description | Min | Typ | Max | Unit |
|---|---|---|---|---|
| External Power Supply Voltage | 2.5 | - | 16 | V |
| Measurement Range | 10 | 3.000 | 6.000 | mm |
| Emission Wavelength | - | 850 | - | nm |
| Ambient Light Illuminance Suppression | - | 100 | 200 | klx |
| Accuracy | - | ±1.5 | - | % |
| Distance Resolution | - | 0.1 | - | mm |
| Precision | 0.5 | 5 | - | mm |
| Description | Min | Typ | Max | Unit |
|---|---|---|---|---|
| External Power Supply Voltage | 2.5 | - | 16 | V |
| Measurement Range | 10 | - | 30.000 | mm |
| Emission Wavelength | - | 850 | - | nm |
| Ambient Light Illuminance Suppression | - | 100 | 200 | klx |
| Accuracy | - | ±1 | - | % |
| Distance Resolution | - | 0.1 | - | mm |
| Precision | 0.5 | 10 | - | mm |
| Description | Min | Typ | Max | Unit |
|---|---|---|---|---|
| External Power Supply Voltage | 2.5 | - | 16 | V |
| Measurement Range | 10 | - | 10.000 | mm |
| Emission Wavelength | - | 680 | - | nm |
| Ambient Light Illuminance Suppression | - | 50 | 100 | klx |
| Accuracy | - | ±1 | - | % |
| Distance Resolution | - | 0.1 | - | mm |
| Precision | 0.5 | 10 | - | mm |
| Description | Min | Typ | Max | Unit |
|---|---|---|---|---|
| Supply Voltage | 3.3 | - | 5 | V |
| Measurement Range | 50 | - | 50.000 | mm |
| Emission Wavelength | - | 850 | - | nm |
| Ambient Light Illuminance Suppression | - | 100 | 200 | klx |
| Relative Distance Accuracy | - | ±2 | - | % |
| Distance Resolution | - | 0.1 | - | mm |
| Precision | 0.5 | 10 | - | mm |
| Description | Min | Typ | Max | Unit |
|---|---|---|---|---|
| Supply Voltage | 3.3 | - | 5 | V |
| Measurement Range | 10 | - | 10.000 | mm |
| Emission Wavelength | - | 850 | - | nm |
| Ambient Light Illuminance Suppression | - | 100 | 200 | klx |
| Relative Distance Accuracy | - | ±1 | - | % |
| Distance Resolution | - | 0.1 | - | mm |
| Precision | 0.5 | 10 | - | mm |

$889.00

$95.00

$549.00

$299.00

$29.00

$29.00

$6.59

$3.60

$119.00

$449.00

$349.00

$349.00

$349.00

$299.00

$269.00

$249.00

$209.00