actually,
i need some help in order to create my hexapod walker.
i used only three servo motor,
1 for the center leg,
1 for the left leg,an
last one is for the right leg.
beside that,
i used PIC16F877A.
i'm very confused how to create a code for leg movements.
plz..
help me..
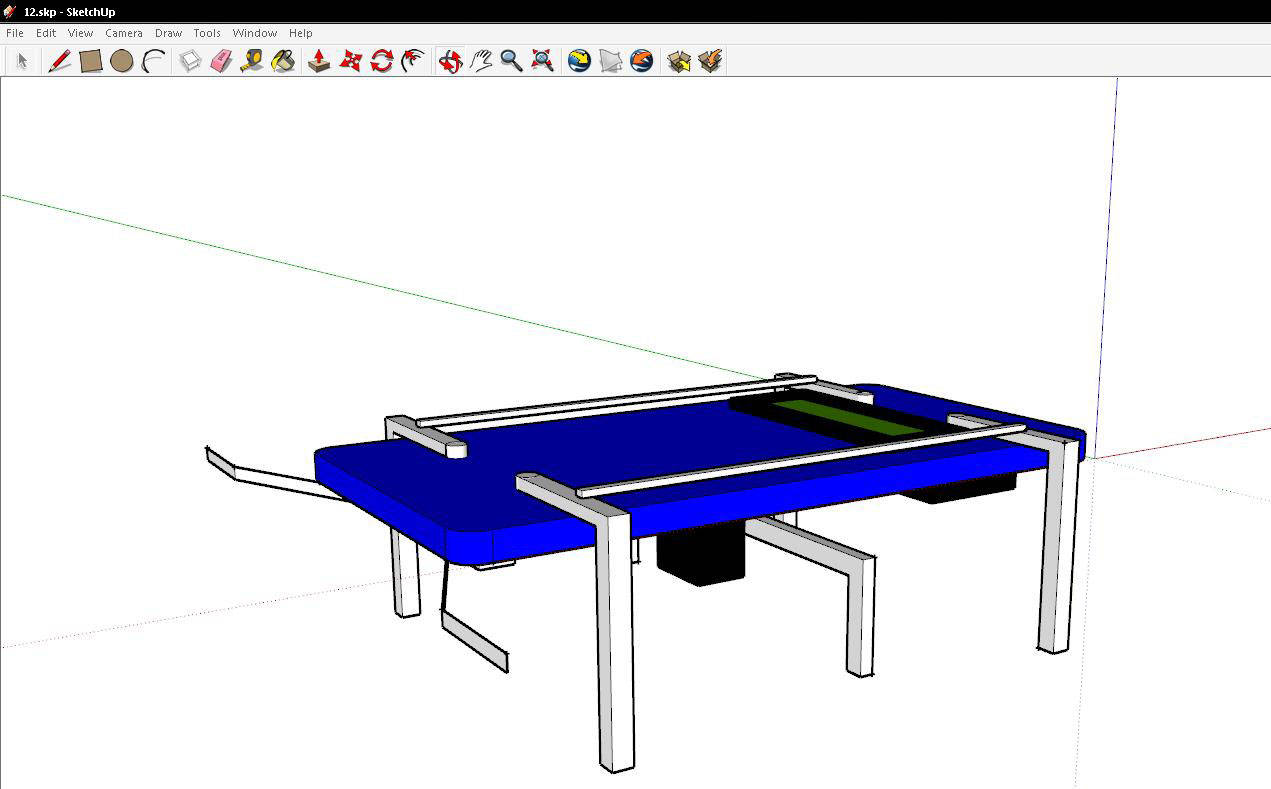
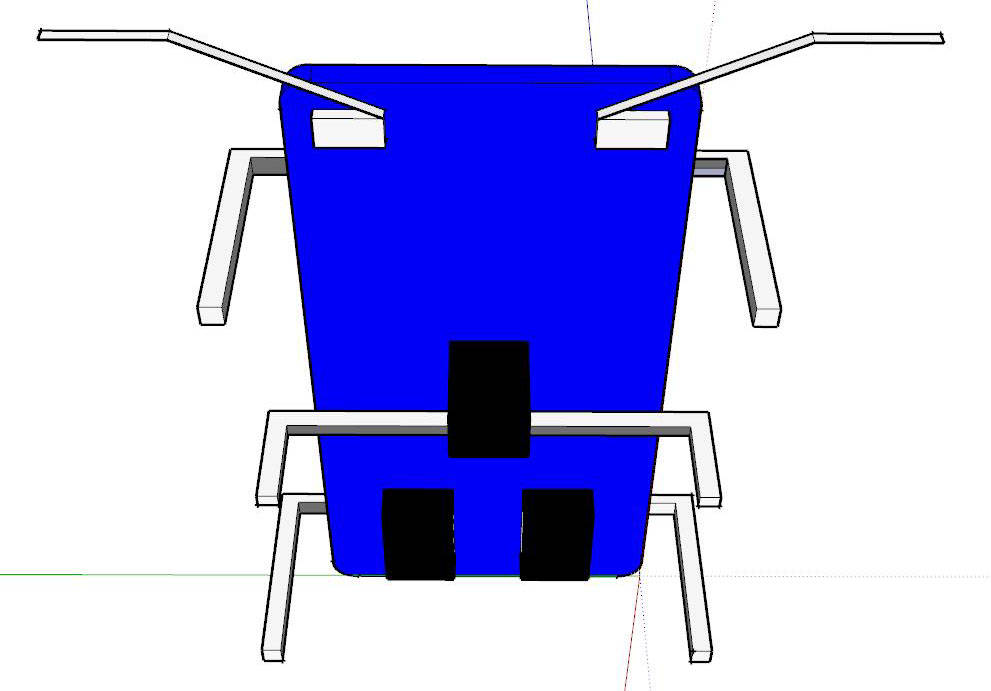
this is my sketch for the hexapod walker.